Comme tous ceux qui suivent l’actualité des nouvelles technologies, je remarque mois après mois les progrès des recherches dans ce domaine. En particulier, il y a une dizaine de jours a été dévoilé au Japon un nouveau robot nommé « HRP-4C », capable de chanter et de danser. Je vous livre donc aujourd’hui quelques réflexions sur ce sujet.
Comme tous ceux qui suivent l’actualité des nouvelles technologies, je remarque mois après mois les progrès des recherches dans ce domaine. En particulier, il y a une dizaine de jours a été dévoilé au Japon un nouveau robot nommé « HRP-4C », capable de chanter et de danser. Je vous livre donc aujourd’hui quelques réflexions sur ce sujet.
 Depuis que l’homme a compris qu’il pouvait construire des machines capables d’être autonomes, celui-ci a imaginé qu’elles pouvaient un jour ou l’autre le remplacer dans certaines tâches. Cela a commencé au niveau d’un certain nombre de tâches simples où les machines en question avaient le statut de simple outil (moulin à eau, voiture, etc.). Puis, la technologie évoluant, ces outils sont devenus de plus en plus perfectionnés et certains domaines en particulier sont nés. Parmi ceux-là, il y a la science des automates, l’informatique, puis la robotique. De nos jours ces trois disciplines se sont rassemblées pour que les robots aient l’air plus vrais que nature ou, en tout cas, de plus en plus proches de l’être humain.
Depuis que l’homme a compris qu’il pouvait construire des machines capables d’être autonomes, celui-ci a imaginé qu’elles pouvaient un jour ou l’autre le remplacer dans certaines tâches. Cela a commencé au niveau d’un certain nombre de tâches simples où les machines en question avaient le statut de simple outil (moulin à eau, voiture, etc.). Puis, la technologie évoluant, ces outils sont devenus de plus en plus perfectionnés et certains domaines en particulier sont nés. Parmi ceux-là, il y a la science des automates, l’informatique, puis la robotique. De nos jours ces trois disciplines se sont rassemblées pour que les robots aient l’air plus vrais que nature ou, en tout cas, de plus en plus proches de l’être humain.
 En réalité, on ne parle de robots que depuis 1941. Le premier à utiliser ce terme fut chercheur et écrivain Isaac Asimov. Ce concept ne s’est répandu qu’à partir d’une dizaine d’années plus tard où l’on a pu développer des robots industriels pour construire des voitures, par exemple, ou encore des robots ménagers pour hacher, mixer, etc. Pendant des années, les robots n’ont en rien pu ressembler aux hommes :
En réalité, on ne parle de robots que depuis 1941. Le premier à utiliser ce terme fut chercheur et écrivain Isaac Asimov. Ce concept ne s’est répandu qu’à partir d’une dizaine d’années plus tard où l’on a pu développer des robots industriels pour construire des voitures, par exemple, ou encore des robots ménagers pour hacher, mixer, etc. Pendant des années, les robots n’ont en rien pu ressembler aux hommes :  le bras mécanique d’un poste à assembler les voitures ne ressemble pas à un humain, pas plus que le robot aspirateur Roomba (dont le nom se prononce comme la danse « rumba ») n’a de jambes pour se déplacer. Ainsi, chaque robot a la forme qui sert le mieux la fonction pour laquelle il a été conçu. Il ne restait qu’aux films de science-fiction la possibilité d’imaginer des robots aux formes vaguement humanoïdes dans un premier temps (par exemple, « Forbidden Planet »/ »Robby the Robot » de Fred M. Wilcox en 1956), puis aux formes des plus réalistes par la suite (« Blade Runner » de Ridley Scott en 1982, mais n’oublions pas « Metropolis » de Fritz Lang en 1927).
le bras mécanique d’un poste à assembler les voitures ne ressemble pas à un humain, pas plus que le robot aspirateur Roomba (dont le nom se prononce comme la danse « rumba ») n’a de jambes pour se déplacer. Ainsi, chaque robot a la forme qui sert le mieux la fonction pour laquelle il a été conçu. Il ne restait qu’aux films de science-fiction la possibilité d’imaginer des robots aux formes vaguement humanoïdes dans un premier temps (par exemple, « Forbidden Planet »/ »Robby the Robot » de Fred M. Wilcox en 1956), puis aux formes des plus réalistes par la suite (« Blade Runner » de Ridley Scott en 1982, mais n’oublions pas « Metropolis » de Fritz Lang en 1927).
Ces dernières années, de nombreux progrès ont été faits qui permettent de s’approcher de ce qu’ont imaginé les scénaristes des films de science-fiction. Celui qui a le premier fait parler de lui était le robot Asimo de Honda. Créé en 1986, ce robot humanoïde ressemble un peu à un cosmonaute. Sa particularité est qu’il sait marcher, cela était d’autant plus remarquable que la gestion de l’équilibre est très difficile à gérer pour un robot sur deux jambes. Nous, les humains, n’imaginons pas forcément tous les microajustements qui sont faits par notre cerveau et nos muscles à chaque instant pour conserver notre équilibre. Et c’est évidemment encore plus difficile quand on danse. Le fait même d’écarter un bras fait se déplacer le centre de gravité de notre corps vers le bras en question et nous oblige à compenser par ailleurs. Si cela n’était pas fait, nous tomberions tout simplement par terre de déséquilibre. Le robot Asimo du début a été amélioré et il a été suivi par d’autres semblables fabriqués par des laboratoires de recherches autres que ceux de Honda. De nos jours, Asimo sait bouger les bras, descendre les escaliers, éviter des obstacles, etc. D’autres robots savent courir, chevaucher un vélo, etc. De là, à savoir danser, le pas est vite franchi.
Et c’est évidemment encore plus difficile quand on danse. Le fait même d’écarter un bras fait se déplacer le centre de gravité de notre corps vers le bras en question et nous oblige à compenser par ailleurs. Si cela n’était pas fait, nous tomberions tout simplement par terre de déséquilibre. Le robot Asimo du début a été amélioré et il a été suivi par d’autres semblables fabriqués par des laboratoires de recherches autres que ceux de Honda. De nos jours, Asimo sait bouger les bras, descendre les escaliers, éviter des obstacles, etc. D’autres robots savent courir, chevaucher un vélo, etc. De là, à savoir danser, le pas est vite franchi.
Je vous propose une petite vidéo de robots dansants. Ils sont fabriqués par Sony et se nomment les SDR-4X. Cette vidéo date de 2006, il y a fort à parier qu’ils font encore mieux aujourd’hui. Cela dit, ils ne se fondent pas encore réellement dans une troupe de danseuses.
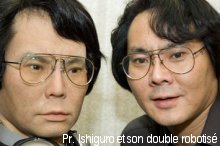
À présent, la vidéo de l’événement que j’évoquais en introduction de cet article. Voici la prestation du robot HRP-4C qui non seulement sait danser, mais il sait aussi chanter en même temps (la voix du robot est une voix de synthèse). Si l’on regarde bien, son visage sait prendre un certain nombre d’expressions humaines. L’équipe de développement de ce robot (National Institute of Advanced Industrial Science and Technology au Japon) appelle sa technologie « Chorenoïd » pour bien montrer que ce robot sait faire plusieurs choses à la fois et que cela est géré simplement par un logiciel. Ce qui m’a frappé dans ce robot est sa capacité à déhancher. Regardez par vous-même.
 On le voit, il est naturel que l’homme essaye de fabriquer des machines à son image et qui se rapprochent le plus possible de ce qu’il sait faire. Ce qui est moins naturel est d’effet inverse. On connaissait « Monsieur Data », le robot « droid » de Star Trek, The Next Generation, qui n’avait de cesse que de ressembler à un humain au point d’apprendre à danser pour faire bonne figure devant une humaine qu’il a invitée dans un épisode. Mais, dans le monde de la danse, et celui du hip-hop en particulier, il y a les humains qui veulent ressembler à des robots. Par exemple, voici un enchaînement dansé par un duo de Danois sur une émission du style « Incroyable Talent » en 2009.
On le voit, il est naturel que l’homme essaye de fabriquer des machines à son image et qui se rapprochent le plus possible de ce qu’il sait faire. Ce qui est moins naturel est d’effet inverse. On connaissait « Monsieur Data », le robot « droid » de Star Trek, The Next Generation, qui n’avait de cesse que de ressembler à un humain au point d’apprendre à danser pour faire bonne figure devant une humaine qu’il a invitée dans un épisode. Mais, dans le monde de la danse, et celui du hip-hop en particulier, il y a les humains qui veulent ressembler à des robots. Par exemple, voici un enchaînement dansé par un duo de Danois sur une émission du style « Incroyable Talent » en 2009.
 D’un côté, les robots qui s’approchent de l’être humain, d’un autre côté les humains qui veulent ressembler à des robots. Je trouve amusante cette comparaison qui nous permet de nous interroger sur notre nature humaine et sur la raison qui nous pousse à danser d’une manière ou d’une autre. Est-ce que cela fait partie de la nature humaine profonde de danser ? Est-ce qu’un robot qui sait danser a gagné une part d’humanité ? Est-ce si compliqué d’être humain que certains cherchent à simplifier cette nature pour se rapprocher de robots ? La liste des questions peut être longue et les réponses ne sont pas si simples que cela. Le débat est ouvert ! Je vous laisse donc ici avec de quoi réfléchir…
D’un côté, les robots qui s’approchent de l’être humain, d’un autre côté les humains qui veulent ressembler à des robots. Je trouve amusante cette comparaison qui nous permet de nous interroger sur notre nature humaine et sur la raison qui nous pousse à danser d’une manière ou d’une autre. Est-ce que cela fait partie de la nature humaine profonde de danser ? Est-ce qu’un robot qui sait danser a gagné une part d’humanité ? Est-ce si compliqué d’être humain que certains cherchent à simplifier cette nature pour se rapprocher de robots ? La liste des questions peut être longue et les réponses ne sont pas si simples que cela. Le débat est ouvert ! Je vous laisse donc ici avec de quoi réfléchir…

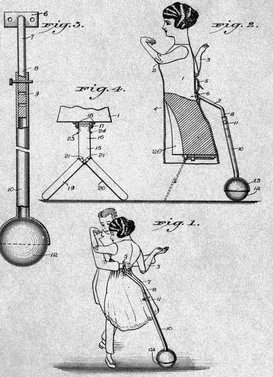
 Il est à noter qu’un système similaire avait été mis en scène dans le spectacle Burn The Floor de 1999 : les danseurs dansaient avec des mannequins de couture sur roulettes. Cela me rappelle que je dois plus ou moins figurer dans cette catégorie des danseurs technophiles car j’ai moi-même conçu ce genre de chose pour m’exercer à une époque ou aucune de mes partenaires de danse n’avait la disponibilité pour s’entraîner avec moi. C’est assez simple, je vous explique… Un fin mât en bois d’1m70 de haut auquel on fixe de simples roulettes réparties sur 3 pieds lestés. On y ajoute une barre horizontale pour matérialiser les épaules. À cette barre, on fixe des manches remplies de tissus pour matérialiser les bras. Ensuite, si on le souhaite, il suffit d’y adjoindre une structure en fil métallique fin sur laquelle on peut mettre un vêtement pour donner une vague impression féminine. Cela m’a permis de travailler quelques figures de rock ou de salsa pendant un temps, quoi qu’on en dise…
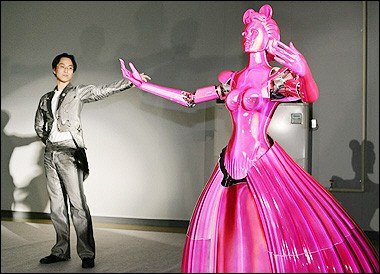
Il est à noter qu’un système similaire avait été mis en scène dans le spectacle Burn The Floor de 1999 : les danseurs dansaient avec des mannequins de couture sur roulettes. Cela me rappelle que je dois plus ou moins figurer dans cette catégorie des danseurs technophiles car j’ai moi-même conçu ce genre de chose pour m’exercer à une époque ou aucune de mes partenaires de danse n’avait la disponibilité pour s’entraîner avec moi. C’est assez simple, je vous explique… Un fin mât en bois d’1m70 de haut auquel on fixe de simples roulettes réparties sur 3 pieds lestés. On y ajoute une barre horizontale pour matérialiser les épaules. À cette barre, on fixe des manches remplies de tissus pour matérialiser les bras. Ensuite, si on le souhaite, il suffit d’y adjoindre une structure en fil métallique fin sur laquelle on peut mettre un vêtement pour donner une vague impression féminine. Cela m’a permis de travailler quelques figures de rock ou de salsa pendant un temps, quoi qu’on en dise… Encore plus récemment, nos amis japonais ont poussé le bouchon encore plus loin. Tout le monde connaît leur passion pour remplacer l’homme par des robots. Ce sont eux qui ont créé le premier robot marcheur à forme humaine (Asimo de Honda), ainsi qu’il y a quelques mois le premier exosquelette motorisé qui permet de se rapprocher des performances de l’homme qui valait trois milliards (série télévisée fétiche des années 80). Ils ont aussi créé il y a quelques mois la partenaire de danse robotisée. Apparemment elle danse la valse. D’un point de vue technique c’est intéressant. Du point de vue du danseur, l’utilité semble assez limitée car cette danseuse motorisée ne semble être ni très maniable, ni très véloce…
Encore plus récemment, nos amis japonais ont poussé le bouchon encore plus loin. Tout le monde connaît leur passion pour remplacer l’homme par des robots. Ce sont eux qui ont créé le premier robot marcheur à forme humaine (Asimo de Honda), ainsi qu’il y a quelques mois le premier exosquelette motorisé qui permet de se rapprocher des performances de l’homme qui valait trois milliards (série télévisée fétiche des années 80). Ils ont aussi créé il y a quelques mois la partenaire de danse robotisée. Apparemment elle danse la valse. D’un point de vue technique c’est intéressant. Du point de vue du danseur, l’utilité semble assez limitée car cette danseuse motorisée ne semble être ni très maniable, ni très véloce…